

いま、生成AI(とくにLLM:大規模言語モデル)の進歩によって、ロボットの世界が大きな転換点を迎えようとしています。この記事では、AIで急速に進化するロボット基盤モデルがもたらす未来像について詳しく紹介します。
常識を理解するロボットが当たり前の時代へ
近年、ロボットが急速に発達した背景には、ロボットに「人間の常識」を教えるためのデータ作り込みがあまりに大変であったという現実があります。
化学実験や作業現場で「この薬品とこの薬品を混ぜると危ない」「段ボールをこう畳めば荷崩れしない」といった常識レベルの知識を、すべてルールベースでロボットに覚えさせるには膨大な労力が必要でした。
しかし、最近のロボット基盤モデル(LLMベースのロボット向けモデル)では、LLMが持つ常識や認識能力を活用することで、従来の常識獲得に関わる苦労を大幅に軽減できる可能性が高まっています。
ロボット基盤モデルが注目される理由

ロボットを動かす上で必要なのは、「命令どおりに動く」だけでなく、「指示の背景にある常識を把握できる」ことです。たとえば「机の上にペットボトルを置いて」と指示した際に、上という概念を理解していないと、間違った位置に置いてしまったり、机を突き抜けるような動き方をしてしまうかもしれません。
そうした常識を網羅的に教え込むのは非常に手間がかかるため、ロボット導入のハードルは高いものでした。しかし、LLMがテキストを通じて「機能的な常識」を理解しているならば、ロボットはよりスムーズに、「安全な行動や物体の扱い方」を学習し、実行できるようになります。
さらに、最近のLLMは画像・動画などのビジョン認識能力も手に入れつつあり、ますます賢く小型化してきています。こうした進化によって、ロボット基盤モデル自体の性能や利便性は急速に高まっています。
ロボット基盤モデルの実例:π0(パイゼロ)
毎月のように新たなロボット基盤モデルが発表される中で、注目を集めているのが「π0(パイゼロ)」と呼ばれるモデルです。
これは、ビジョン(画像・動画)とテキストの両方を理解できるVLM(Vision-Language Model)を基盤に、ロボット向けの追加学習を施したもの。以下のような事例が挙げられています。
- 洗濯物タスク
洗濯機から衣類を取り出し、カゴに入れ、洗濯機のドアを閉めてテーブルの上に運び、畳むまでを単一のモデルに指示するだけで実行することができる。
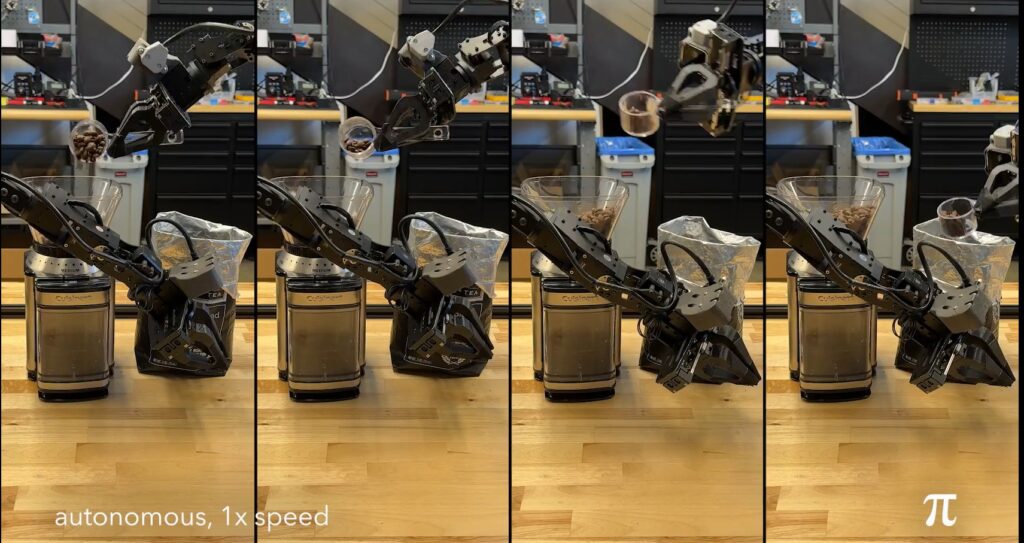
洗濯物を畳むというのは難易度の高い作業ですが、π0ではある程度できていることが動画で示されています。 - 調理や実験自動化
ヒトが危険と感じる化学薬品の取り扱いや、複雑な調理過程も、ロボット基盤モデルが安全面や手順を理解してサポートできる可能性が示唆されています。 - 物流センターでの段ボールタスク
段ボールを畳んだり作ったりといった、実は人手がかかりがちな作業にも応用が期待されています。
これらの作業は従来、個別にカスタマイズされた専用マシンや膨大なルールベースで対応してきました。しかし、ロボット基盤モデルは「プロンプト指示」で汎用的にタスクをこなせるため、これまでにない柔軟性を実現しつつあります。
どのようにロボット基盤モデルを作るのか(π0の場合)

1. VLM(ビジョン・ランゲージモデル)の準備
まずは、画像とテキストを入力として理解できるモデルを用意します。近年は、インターネット上で収集したデータによる事前学習モデルが多数存在し、PaliGemmaのように高性能かつモデルサイズが比較的小さめ(2.6Bパラメータ)なものも登場しています。
2. 大規模ロボットデータでの学習
一般的なインターネットデータには、ロボットが物理的にどのように動いたか(実世界とのインタラクションデータ)はほとんど含まれていません。そこで、1万時間分にもおよぶロボットの動作データを収集・学習させます。
ここでは複数のロボットが実際にタスクをこなすデータが含まれ、さまざまな行動パターンが詰まっています。
3. プロンプトとセンサ情報を入力し、制御シーケンスを出力
最終的に必要なのは、ロボットが「プロンプト(指示)」と「カメラなどのセンサ情報」を受け取り、リアルタイム(最大50Hz程度)で行動を出力することです。
π0では「自己回帰的に1ステップずつ生成」ではなく、フローマッチング手法を使うことで並列的に行動列を生成し、高速化を実現しています。
4. 少量の追加学習(ファインチューニング)
上述の大規模学習モデルがあっても、実際に個別のタスクを精度高くこなすには、10時間程度(あるいはそれ以下)といった少量のデータで追加学習を行う必要があります。
これにより、新しい作業手順や環境にモデルを素早く最適化できます。
5. アクションエクスパート(Action Expert)
複数種類のロボットに対応するため、ロボットごとに異なる制御シーケンスを出力できるように工夫されています。
LLM(VLM)のコア部分は同じでも、実際のアクションを生成する「Action Expert」モジュールはロボットの種類に応じて切り替えられ、Mixture of Experts(MoE)の仕組みを利用しているのが特徴です。
ロボット基盤モデル:今後の課題と展望

1. シミュレーションの活用
物理世界で危険な実験を繰り返すのは困難です。今後はシミュレーションデータを活用して、ロボットの安全性やタスク成功率をあらかじめ検証し、そのギャップをどう埋めるかが大きなテーマになるでしょう。
また、動画生成モデルなどの高度なシミュレーション技術を併用できるようになれば、学習の効率化や安全性検証がより進むと期待されています。
2. ハードウェア面の進化
どんなに頭脳(基盤モデル)が優秀でも、ロボットの物理的な仕様が不十分では高度なタスクを実行できません。
たとえば、複雑な動作には指の本数を増やしたり、アームの可動域を広げたりといったハードウェア側のアップデートが欠かせません。また、家庭用ロボットとして使うには「安全・小型・静音」などの要件もクリアする必要があり、さらなる研究開発が必要です。
まとめ:ロボット基盤モデルの時代はすぐそこに

ロボット基盤モデルの登場は、ロボットの普及における「常識不足」問題を解消する大きな一歩です。これまで個別対応が当たり前だったロボット導入を、あたかも「AIに話しかけるように」利用できる世界が現実味を帯びています。
まだ課題は多く残っていますが、近い将来、調理や実験自動化、倉庫作業、日常の家事など多岐にわたってロボットが活躍する時代が来るでしょう。私たちの生活を根底から支える可能性を秘めたロボット基盤モデルから、ますます目が離せません。
参考)π 0 : Our First Generalist Policy

